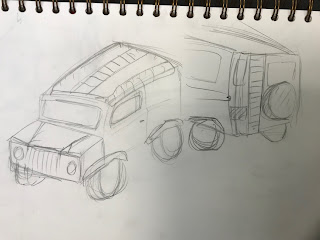
Artistic Design

To fit in with the disaster theme, we decided to theme the robot after a beat up land rover or jeep. We designed the chassis in CAD, and 3D printed it, before applying paint. We started with a filler -primer to try and fill in some of the layer lines and prep it for painting, before covering it with a chrome layer. Next we used vaseline to protect areas of silver, before painting it all orange and washing the vaseline off. This created a chipped paint effect, but also stripped some of the chrome paint, revealing the dull orange primer, making the car seem rusted. Although this was not our intention, it worked out quite well. We chose to do a bright orange overcoat, as it has connotations of danger.